
ArmKit
A data capture device with a compact handle design, enabling human operators to capture manipulation data in spaces accessible to robotic arms. For additional details, see our hardware-focused report.
Responsibilities
-
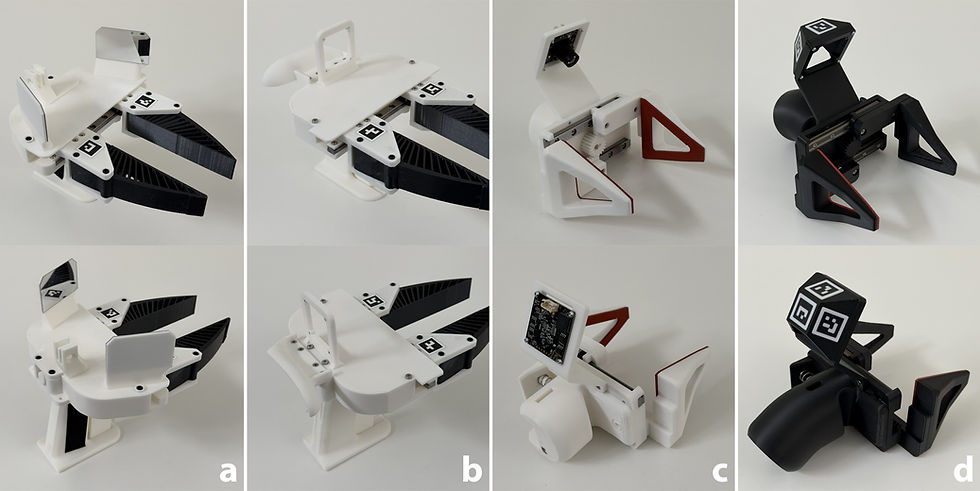
Redesigned the handle and actuation mechanism of a UMI-based gripper tailored for our application
-
Collaborated with software and hardware teams to implement required hardware features
-
Support the software team in collecting manipulation data and evaluating robotic performance


“UMI is a strong reference, but our application required a different design approach.” Existing devices relied on a vertical handle form factor, which limited access in dishwashing environments where reaching deep into bus tubs and sink basins is essential.
.jpg)
I explored a more compact form factor, guided by the principle that any space accessible to the robot gripper should also be reachable by the device itself. This led to a shift away from traditional handle-based mechanisms toward a thumb-driven pinching interaction.


For localization, we are using a Quest controller. However, we plan to replace this with ArUco marker-based tracking to reduce both weight and cost. In its current configuration, the unit weighs about 450g and costs around $200 per unit.


One of the most striking aspects of this project was adopting a new AI-driven workflow. To communicate a new direction to investors, I compressed ideation, design, and video production into a two-week sprint, something that would not have been possible without it.
Currently, the software team is using the device I designed to collect real-world manipulation episodes for policy learning. For additional details, see our hardware-focused report.


Further process and information available upon request.